Drone sous-marin et robot subaquatique : la révolution de l'inspection industrielle
Le drone sous-marin, techniquement défini comme ROV (Remotely Operated Vehicle), est une plateforme robotique téléopérée conçue pour l'acquisition de données en milieu immergé. Souvent désigné par le grand public comme robot sous-marin ou robot subaquatique, cet outil technologique ne se contente pas de filmer : c'est un vecteur modulaire capable d'emporter des capteurs avancés (sonars, sondes, lasers) là où la présence humaine est impossible ou trop risquée. Décryptage d'une technologie qui redéfinit l'accès au monde subaquatique.
Définition technique du ROV (Robot subaquatique)

Pour appréhender ce qu'est un robot subaquatique professionnel, il est impératif de le distinguer des autres familles de drones aquatiques, notamment les AUV (Autonomous Underwater Vehicles) qui naviguent sans pilote selon une programmation préalable. Le ROV est un système strictement filoguidé, dont l'architecture repose sur une dépendance physique et énergétique avec la surface. Ce lien vital définit sa nature même : c'est un outil de téléprésence en temps réel.
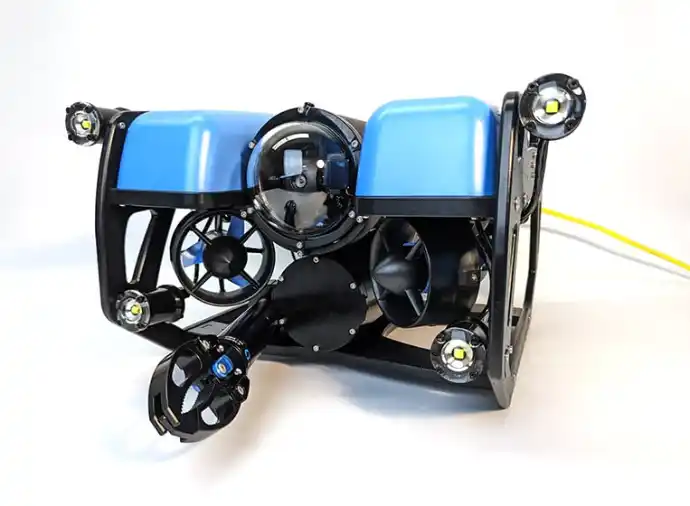
Structurellement, un ROV d'inspection (classe Observation ou Light Work) est généralement constitué d'un châssis ouvert, dit "open frame", fabriqué en polymère haute densité (HDPE) ou en alliage d'aluminium anodisé de grade marin. Cette conception modulaire est cruciale pour l'hydrodynamisme, mais surtout pour la customisation. Elle permet de fixer des équipements périphériques selon la mission :
Bras manipulateurs pour la préhension.
Sondes de mesure physico-chimique.
Sonars et caméras additionnelles.
Contrairement à un sous-marin habité qui doit gérer des systèmes de survie complexes, l'architecture du ROV est entièrement dédiée à trois fonctions critiques : la propulsion vectorielle, la communication haut débit et l'acquisition de données massives. La miniaturisation récente des composants électroniques a permis de compresser cette architecture, transformant des machines de plusieurs tonnes en unités portables de quelques dizaines de kilogrammes, sans sacrifier leur puissance de calcul embarquée.
Le saviez-vous ? Selon la Marine Technology Society, l'utilisation de matériaux composites avancés a permis de réduire le poids des structures de ROV de 40% en une décennie, augmentant considérablement leur charge utile (payload)
L’Ombilical (Tether) : la colonne vertébrale du système
L’élément le plus distinctif d’un robot sous-marin est son ombilical, souvent appelé tether dans le jargon technique offshore. Ce n'est pas une simple corde de sécurité, mais une merveille d'ingénierie qui conditionne la performance globale du vecteur. Composé de conducteurs en cuivre pour la puissance et, de plus en plus fréquemment, de fibres optiques pour les données, l’ombilical est le nerf de la guerre de l'inspection. Il assure deux fonctions vitales :
Une alimentation électrique continue : Contrairement aux drones aériens sur batterie, le ROV est alimenté depuis la surface. Cela offre au robot subaquatique une autonomie théoriquement infinie, limitée uniquement par la fatigue de l'opérateur ou la maintenance des génératrices. Cette puissance est indispensable pour alimenter des éclairages LED puissants (plusieurs dizaines de milliers de lumens) et des propulseurs gourmands lors de navigations à contre-courant.
Un transfert de données haut débit : La fibre optique garantit un débit massif (Gigabit Ethernet), nécessaire pour remonter simultanément plusieurs flux vidéo en 4K, les données brutes des sonars et la télémétrie des capteurs en temps réel, sans aucune latence.
La gestion de la "traînée" (le frottement de ce câble dans l'eau) est un enjeu majeur du pilotage. Cela nécessite parfois l'usage de gestionnaires de câble (TMS - Tether Management System) ou l'ajout de flotteurs pour éviter que le poids de l'ombilical ne perturbe l'assiette du drone et ne fausse les données de navigation.
Propulsion vectorielle et stabilité dynamique (6 DoF)
La différence majeure entre un drone sous-marin de loisir et un robot subaquatique d'inspection industrielle réside dans sa capacité à se mouvoir et à se stabiliser dans un fluide en mouvement. Les vecteurs professionnels utilisent une configuration de propulseurs dite "vectorielle".
Au lieu d'être simplement orientés vers l'avant et l'arrière, les moteurs (généralement au nombre de 6 ou 8) sont disposés selon des angles calculés (souvent à 45° pour les horizontaux) pour offrir 6 degrés de liberté (6 DoF) :
Translations : Avancer/Reculer, Gauche/Droite, Monter/Descendre.
Rotations : Lacet (gauche/droite), Tangage (avant/arrière), Roulis (inclinaison latérale).
Cette omnidirectionnalité est vitale pour l'inspection technique d'ouvrages complexes comme les barrages ou les écluses. Elle permet au ROV de réaliser des "travellings" parfaits le long d'une paroi verticale ou de se maintenir en stationnaire (station keeping) face à un défaut structurel malgré le courant. L'électronique embarquée joue ici un rôle crucial : des centrales inertielles (IMU) couplées à des algorithmes de contrôle PID corrigent en micro-secondes la puissance de chaque moteur pour compenser la dérive induite par les flux hydrauliques. C’est cette stabilité dynamique qui transforme le robot en trépied photographique subaquatique, garantissant des images nettes.
La vision en milieu aquatique : optique et éclairage
L’acquisition visuelle est la fonction première du drone sous-marin, mais filmer sous l'eau présente des défis physiques que les caméras terrestres ne peuvent relever seules. L'eau agit comme un filtre chromatique sélectif, absorbant rapidement les longueurs d'onde du spectre lumineux. Le rouge disparaît dès les premiers mètres, suivi de l'orange et du jaune, rendant l'image bleuâtre et terne.
Pour contrer ce phénomène et l'obscurité totale des milieux confinés ou profonds, le robot subaquatique doit embarquer une chaîne d'image sophistiquée :
Capteurs haute sensibilité : Utilisation de capteurs CMOS ou CCD "Low Lux" capables de voir dans la pénombre quasi-totale.
Objectifs grand angle : Pour maximiser le champ de vision tout en limitant les déformations géométriques (effet fish-eye).
Éclairage actif dynamique : Les ROV modernes sont équipés de projecteurs LED à haute intensité, dont l'indice de rendu des couleurs (IRC) et la température (Kelvin) sont calibrés pour restituer la réalité des matériaux inspectés (béton, acier, sédiments).
De plus, la position de ces sources lumineuses est stratégique : elles doivent être déportées de l'axe de la caméra pour éviter l'effet de "rétrodiffusion" (backscatter). Ce phénomène optique se produit lorsque la lumière se reflète sur les particules en suspension face à l'objectif, créant un mur blanc visuel similaire à des phares de voiture dans le brouillard, rendant l'image inexploitable sans cet éclairage déporté.
Au-delà de l'image : l'acoustique et les sonars
Lorsque la turbidité de l'eau rend la vision optique inopérante (visibilité inférieure à quelques centimètres), le drone sous-marin doit changer de sens et passer de la vue à l'ouïe technologique : l'acoustique. C'est ici que le robot subaquatique démontre sa supériorité en tant que plateforme instrumentée. Il peut être équipé de différents types de sonars, une technologie initialement développée pour la bathymétrie par des organismes comme la NOAA.
Les principaux équipements acoustiques embarqués sont :
Le sonar à balayage mécanique (Scanning Sonar) : Il génère une image acoustique radiale à 360°, idéale pour l'évitement d'obstacles et le repérage dans les conduites.
Le sonar multifaisceaux (Multibeam) : Il permet de "voir" littéralement à travers l'eau trouble pour identifier des obstacles, modéliser des parois ou repérer des objets immergés en 3D.
Le sonar à balayage latéral (Side Scan Sonar) : Utilisé pour cartographier le fond sédimentaire ou l'état d'un radier sur de grandes distances.
Ces instruments transforment les ondes sonores en images interprétables, permettant de mesurer des distances, de quantifier des volumes de sédiments ou de localiser des désordres structurels majeurs là où une caméra ne verrait qu'un écran noir. L'intégration de ces capteurs acoustiques sur des vecteurs compacts est une avancée récente qui permet de réaliser des diagnostics complets (visuels et acoustiques) lors d'une même intervention, offrant une redondance de données essentielle pour la prise de décision.
Instrumentation NDT et contrôle non destructif
La véritable valeur ajoutée d'un drone sous-marin industriel réside dans sa capacité à réaliser des Contrôles Non Destructifs (CND ou NDT). Le vecteur devient alors un simple support (un "taxi") pour des outils de mesure de précision qui entrent en contact physique ou distant avec l'ouvrage.
Parmi les instruments les plus courants intégrés aux ROV via leurs ports auxiliaires, on trouve :
Jauges d'épaisseur par ultrasons : Montée sur un bras manipulateur ou une perche articulée, cette sonde vient se plaquer contre une paroi métallique (cuve industrielle, palplanche, coque de navire) pour mesurer l'épaisseur d'acier restant et ainsi évaluer le taux de corrosion sans aucun prélèvement destructif.
Sondes de protection cathodique (CP) : Elles mesurent le potentiel électrique des structures immergées pour vérifier l'efficacité des anodes sacrificielles qui protègent l'ouvrage de la rouille.
Lasers de dimensionnement : Deux faisceaux parallèles sont projetés par le ROV pour donner une échelle visuelle et mesurer la taille d'une fissure ou d'un impact avec une précision millimétrique.
Cette instrumentation transforme le rapport d'inspection : on passe d'une observation subjective ("l'état semble correct") à une donnée quantitative certifiée ("il reste 12,4 mm d'acier"), permettant aux bureaux d'études de calculer la durée de vie résiduelle de l'ouvrage avec précision.
Navigation et positionnement sous-marin (USBL / DVL)
Savoir ce que l'on regarde est utile, mais savoir exactement où se trouve le robot sous-marin au moment de l'observation est crucial pour la maintenance à long terme et l'intégration SIG (Système d'Information Géographique). Le problème majeur en milieu subaquatique est que les ondes électromagnétiques GPS ne pénètrent pas l'eau. Le ROV évolue donc "à l'aveugle" en termes de géolocalisation satellitaire classique.
Pour pallier cela, les robots subaquatiques avancés utilisent une combinaison de technologies acoustiques :
USBL (Ultra Short Base Line) : Ce système repose sur le dialogue acoustique entre une balise (transpondeur) fixée sur le ROV et une base immergée en surface. En calculant le temps de trajet du son et l'angle d'arrivée, le système détermine la position X, Y, Z du robot avec une précision centimétrique.
DVL (Doppler Velocity Log) : Il agit comme un "tapis roulant" virtuel, analysant le décalage Doppler des ondes renvoyées par le fond pour calculer le déplacement relatif du drone et verrouiller sa position.
Ces technologies permettent de géoréférencer chaque photo, chaque mesure et chaque défaut détecté, offrant une traçabilité parfaite pour le suivi des ouvrages dans le temps et permettant de revenir exactement au même point lors de l'inspection suivante.
Classification des ROV : de l'observation au travail
Le terme générique drone sous-marin couvre une large gamme de machines classifiées par l'IMCA (International Marine Contractors Association) selon leur poids, leur puissance et leur capacité d'intervention. Cette segmentation permet de choisir le bon outil pour la bonne mission.
On distingue principalement :
Micro-ROV : Des unités de moins de 5 kg, très portables. Elles sont idéales pour des inspections rapides en milieux très exiguës comme les canalisations d'eau potable, les petits réservoirs ou les siphons difficiles d'accès.
Mini-ROV (Observation Class) : Le cœur du marché de l'inspection côtière et industrielle. Pesant entre 15 et 80 kg, ces robots offrent le meilleur compromis entre portabilité (mise à l'eau à la main ou avec une petite potence) et capacité d'emport de capteurs (sonars, sondes). C'est la catégorie la plus polyvalente.
Work Class (Light & Heavy) : Des engins de plusieurs centaines de kilogrammes à plusieurs tonnes, équipés de bras hydrauliques puissants capables de visser, couper, souder ou déplacer des charges lourdes. Ils sont réservés aux grands travaux offshore et nécessitent des navires supports lourds.
Le choix du vecteur robot subaquatique dépend donc strictement de la mission : inutile de déployer un monstre de 500 kg pour inspecter une crépine d'aspiration, tout comme un micro-ROV sera inefficace dans les forts courants marins d'un parc éolien offshore.
Pour aller plus loin : Guidelines for ROV Operations - IMCA
Contraintes opérationnelles et limites physiques
Malgré toute la technologie embarquée, l'utilisation d'un robot subaquatique reste soumise à des contraintes physiques immuables que le vecteur doit affronter lors de chaque mission.
Le courant : C'est l'ennemi numéro un. La puissance des propulseurs doit être suffisante pour contrer la force hydraulique (souvent supérieure à 2 ou 3 nœuds dans les fleuves) tout en traînant l'ombilical, qui agit comme une véritable voile sous-marine. C'est pourquoi le rapport poids/puissance et l'hydrodynamisme du châssis sont des critères essentiels de conception.
La turbidité : Même avec les meilleurs éclairages du marché, une eau chargée de sédiments bloque la propagation de la lumière. Le ROV doit alors pouvoir naviguer aux instruments (compas, profondimètre, sonar) sans repères visuels, ce qui exige une grande fiabilité des capteurs télémétriques.
L'accessibilité et l'encombrement : L'inspection des zones confinées (tunnels, siphons, inspection de canalisations) pose le problème de la gestion du câble. Le risque d'emmêlement ou de coincement de l'ombilical est réel. Les vecteurs modernes intègrent des protections d'hélices et des carénages lisses pour minimiser les risques d'accrochage.
L'opérateur ROV : le cerveau derrière la machine
Il est fondamental de rappeler qu'un drone sous-marin, aussi sophistiqué soit-il, n'est qu'une extension des sens de l'opérateur. La qualité de l'inspection dépend intrinsèquement de la compétence du pilote ROV qui contrôle le vecteur depuis la surface.
Le pilotage d'un robot subaquatique exige une coordination visuo-spatiale complexe. Le pilote doit se repérer dans un espace en trois dimensions via un écran en deux dimensions, souvent avec une visibilité dégradée et des repères mouvants (algues, poissons, bulles).
Au-delà du pilotage pur, l'opérateur ROV doit posséder une expertise technique pour interpréter en temps réel ce qu'il voit :
Distinguer une simple algue d'une fissure structurelle grave.
Analyser une corrosion par piqure.
Comprendre un phénomène hydraulique d'aspiration dangereux pour la machine.
La maîtrise du vecteur inclut aussi la gestion physique de l'ombilical, la surveillance des paramètres du système (température électronique, hygrométrie interne, étanchéité) et la capacité à réagir aux urgences. C'est ce binôme indissociable "Machine + Humain" qui garantit la réussite d'une mission. Le matériel le plus performant du monde ne produira aucun résultat exploitable s'il n'est pas guidé par une main experte et un œil formé à la pathologie des ouvrages.
Les robots sous-marin d'inspection de la flotte Visieaudrone
Dans ce contexte technologique exigeant, les drones exploités par Visieaudrone représentent l'état de l'art du robot subaquatique d'inspection portable. Contrairement aux drones généralistes de loisir adaptés à l'eau claire, les vecteurs de la flotte Visieaudrone sont spécifiquement sélectionnés et configurés pour les environnements industriels hostiles et techniques.
Ces robots se caractérisent par :
Une architecture modulaire : Permettant l'intégration rapide de capteurs spécifiques (sonars multibeam, sondes NDT, pinces) selon les besoins précis du client.
Un rapport poids/puissance optimisé : Garantissant une stabilité parfaite (station keeping) même dans les zones de remous, assurant une netteté d'image indispensable au diagnostic structurel fin.
Une vision augmentée : Équipés de caméras 4K à très haute sensibilité et de systèmes d'éclairage déportés dynamiques (pour contrer la rétrodiffusion), ils excellent dans les eaux turbides typiques des ouvrages hydrauliques, des stations d'épuration ou des cuves industrielles.
La force unique des vecteurs Visieaudrone réside dans leur capacité à déployer une technologie de niveau "Work Class" (sonar, positionnement, mesure d'épaisseur) dans un format compact de "Mini-ROV". Cela permet une mise en œuvre rapide, flexible et sécurisée sur n'importe quel site, sans la logistique lourde (grue, navire) habituellement associée aux moyens maritimes traditionnels.
Le ROV, pivot de la maintenance prédictive 4.0
L'intégration du drone sous-marin dans les processus industriels n'est pas une simple évolution de l'outillage, c'est une transformation profonde de la stratégie de maintenance. En passant d'une logique curative (intervenir quand ça casse) ou préventive lourde (vidanger un ouvrage pour vérifier son état), le robot subaquatique permet de basculer vers une véritable maintenance prédictive.
La facilité de déploiement de ces vecteurs légers permet de :
Multiplier les fréquences d'inspection à moindre coût.
Constituer des historiques de données précis et comparables.
Modéliser le vieillissement des installations grâce au jumeau numérique.
Le robot subaquatique est aujourd'hui une technologie mature. Il ne remplace pas l'expertise humaine, il l'augmente. Il offre à l'ingénieur, à l'expert maritime ou au gestionnaire d'ouvrage le don d'ubiquité : la capacité d'inspecter l'intérieur d'un réservoir d'eau potable, d'une cuve sprinkler ou d'un bassin technique industriel, tout en restant au sec, en sécurité, et avec un niveau de précision que l'œil humain seul ne pourrait atteindre dans les abysses. Avec une instrumentation de pointe et des vecteurs toujours plus maniables, l'inspection subaquatique par ROV est devenue le standard incontournable de l'industrie moderne.